Astrobee: A Holonomic Free-Flying Space Robot¶
Note
You can download this example as a Python script:
astrobee.py or Jupyter notebook:
astrobee.ipynb.
Astrobee is a new generation of free-flying robots aboard the International Space Station (ISS). It is a cubic robot with sides measuring about 30 cm each. The robot is propelled by two fans located on the sides of the robot and servo-actuated louvred vent nozzles, which allow for full six degree-of-freedom holonomic control [Smith2016]. Here, the nonlinear dynamics of Astrobee are modeled using Kane’s method and the holonomic behavior of the system is demonstrated. After derivation of the nonlinear equations of motion, the system is linearized about a chosen operating point to obtain an explicit first order state-space representation, which can be used for control design.
import sympy as sm
import sympy.physics.mechanics as me
from pydy.system import System
import numpy as np
import matplotlib.pyplot as plt
from pydy.codegen.ode_function_generators import generate_ode_function
from scipy.integrate import odeint
import scipy.io as sio
me.init_vprinting()
Reference Frames¶
ISS = me.ReferenceFrame('N') # ISS RF
B = me.ReferenceFrame('B') # body RF
q1, q2, q3 = me.dynamicsymbols('q1:4') # attitude coordinates (Euler angles)
B.orient(ISS, 'Body', (q1, q2, q3), 'xyz') # body RF
t = me.dynamicsymbols._t
Significant Points¶
O = me.Point('O') # fixed point in the ISS
O.set_vel(ISS, 0)
x, y, z = me.dynamicsymbols('x, y, z') # translation coordinates (position of the mass-center of Astrobee relative to 'O')
l = sm.symbols('l') # length of Astrobee (side of cube)
C = O.locatenew('C', x * ISS.x + y * ISS.y + z * ISS.z) # Astrobee CM
Kinematical Differential Equations¶
ux = me.dynamicsymbols('u_x')
uy = me.dynamicsymbols('u_y')
uz = me.dynamicsymbols('u_z')
u1 = me.dynamicsymbols('u_1')
u2 = me.dynamicsymbols('u_2')
u3 = me.dynamicsymbols('u_3')
z1 = sm.Eq(ux, x.diff())
z2 = sm.Eq(uy, y.diff())
z3 = sm.Eq(uz, z.diff())
z4 = sm.Eq(u1, q1.diff())
z5 = sm.Eq(u2, q2.diff())
z6 = sm.Eq(u3, q3.diff())
u = sm.solve([z1, z2, z3, z4, z5, z6], x.diff(), y.diff(), z.diff(), q1.diff(), q2.diff(), q3.diff())
u
Translational Motion¶
Velocity¶
C.set_vel(ISS, C.pos_from(O).dt(ISS).subs(u))
V_B_ISS_ISS = C.vel(ISS)
V_B_ISS_ISS # "velocity of Astrobee CM w.r.t ISS RF expressed in ISS RF"
Acceleration¶
A_B_ISS_ISS = C.acc(ISS).subs(u) #.subs(ud)
A_B_ISS_ISS # "acceleration of Astrobee CM w.r.t ISS RF expressed in ISS RF"
Angular Motion¶
Angular Velocity¶
B.set_ang_vel(ISS, B.ang_vel_in(ISS).subs(u))
Omega_B_ISS_B = B.ang_vel_in(ISS)
Omega_B_ISS_B # "angular velocity of body RF w.r.t ISS RF expressed in body RF"
Angular Acceleration¶
Alpha_B_ISS_B = B.ang_acc_in(ISS).subs(u) #.subs(ud)
Alpha_B_ISS_B # "angular acceleration of body RF w.r.t ISS RF expressed in body RF"
Mass and Inertia¶
m = sm.symbols('m') # Astrobee mass
Ix, Iy, Iz = sm.symbols('I_x, I_y, I_z') # principal moments of inertia
I = me.inertia(B, Ix, Iy, Iz) # inertia dyadic
I
Loads¶
Forces¶
Fx_mag, Fy_mag, Fz_mag = me.dynamicsymbols('Fmag_x, Fmag_y, Fmag_z')
Fx = Fx_mag * ISS.x
Fy = Fy_mag * ISS.y
Fz = Fz_mag * ISS.z
Fx, Fy, Fz
Torques¶
T1_mag, T2_mag, T3_mag = me.dynamicsymbols('Tmag_1, Tmag_2, Tmag_3')
T1 = T1_mag * B.x
T2 = T2_mag * B.y
T3 = T3_mag * B.z
T1, T2, T3
Kane’s Method¶
kdes = [z1.rhs - z1.lhs,
z2.rhs - z2.lhs,
z3.rhs - z3.lhs,
z4.rhs - z4.lhs,
z5.rhs - z5.lhs,
z6.rhs - z6.lhs]
body = me.RigidBody('body', C, B, m, (I, C))
bodies = [body]
loads = [
(C, Fx),
(C, Fy),
(C, Fz),
(B, T1),
(B, T2),
(B, T3)
]
kane = me.KanesMethod(ISS, (x, y, z, q1, q2, q3), (ux, uy, uz, u1, u2, u3), kd_eqs=kdes)
fr, frstar = kane.kanes_equations(bodies, loads=loads)
Simulation¶
sys = System(kane)
sys.constants_symbols
sys.constants = {
Ix: 0.1083,
Iy: 0.1083,
Iz: 0.1083,
m: 7
}
sys.constants
sys.times = np.linspace(0.0, 50.0, num=1000)
sys.coordinates
sys.speeds
sys.states
sys.initial_conditions = {
x: 0.0,
y: 0.0,
z: 0.0,
q1: 0.0,
q2: 0.0,
q3: 0.0,
ux: 0.2,
uy: 0.0,
uz: 0.0,
u1: 0.0,
u2: 0.0,
u3: 0.5
}
sys.specifieds_symbols
sys.specifieds = {
Fx_mag: 0.0,
Fy_mag: 0.0,
Fz_mag: 0.0,
T1_mag: 0.0,
T2_mag: 0.0,
T3_mag: 0.0
}
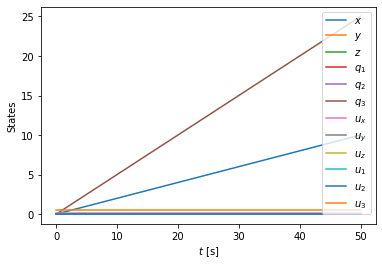
states = sys.integrate()
import matplotlib.pyplot as plt
fig, ax = plt.subplots()
ax.plot(sys.times, states)
ax.set_xlabel('{} [s]'.format(sm.latex(t, mode='inline')));
ax.set_ylabel('States');
ax.legend(['$x$', '$y$', '$z$', '$q_1$', '$q_2$', '$q_3$', '$u_x$', '$u_y$', '$u_z$', '$u_1$', '$u_2$', '$u_3$'], fontsize=10)
plt.show()
3D Visualization¶
from pydy.viz import Box, Cube, Sphere, Cylinder, VisualizationFrame, Scene
l = 0.32
body_m_shape = Box(l, (1/2) * l, (2/3) * l, color='black', name='body_m_shape')
body_l_shape = Box(l, (1/4) * l, l, color='green', name='body_l_shape')
body_r_shape = Box(l, (1/4) * l, l, color='green', name='body_r_shape')
v1 = VisualizationFrame('Body_m',
B,
C.locatenew('C_m', (1/6) * l * B.z),
body_m_shape)
v2 = VisualizationFrame('Body_l',
B,
C.locatenew('C_l', (3/8) * l * -B.y),
body_l_shape)
v3 = VisualizationFrame('Body_r',
B,
C.locatenew('C_r', (3/8) * l * B.y),
body_r_shape)
scene = Scene(ISS, O, system=sys)
scene.visualization_frames = [v1, v2, v3]
scene.display_jupyter(axes_arrow_length=1.0)
Linearization¶
f = fr + frstar
f
V = {
x: 0.0,
y: 0.0,
z: 0.0,
q1: 0.0,
q2: 0.0,
q3: 0.0,
ux: 0.0,
uy: 0.0,
uz: 0.0,
u1: 0.0,
u2: 0.0,
u3: 0.0,
Fx_mag: 0.0,
Fy_mag: 0.0,
Fz_mag: 0.0,
T1_mag: 0.0,
T2_mag: 0.0,
T3_mag: 0.0
}
V_keys = sm.Matrix([ v for v in V.keys() ])
V_values = sm.Matrix([ v for v in V.values() ])
us = sm.Matrix([ux, uy, uz, u1, u2, u3])
us_diff = sm.Matrix([ux.diff(), uy.diff(), uz.diff(), u1.diff(), u2.diff(), u3.diff()])
qs = sm.Matrix([x, y, z, q1, q2, q3])
rs = sm.Matrix([Fx_mag, Fy_mag, Fz_mag, T1_mag, T2_mag, T3_mag])
Ml = f.jacobian(us_diff).subs(sys.constants).subs(V)
Ml
Cl = f.jacobian(us).subs(V)
Cl.subs(sys.constants)
Kl = f.jacobian(qs).subs(V)
sm.simplify(Kl.subs(sys.constants))
Hl = -f.jacobian(rs).subs(V)
sm.simplify(Hl.subs(sys.constants))
A = sm.Matrix([[(-Ml.inv()*Cl), (-Ml.inv()*Kl)], [(sm.eye(6)), sm.zeros(6, 6)]])
sm.simplify(A.subs(sys.constants))
B = sm.Matrix([[Ml.inv() * Hl], [sm.zeros(6, 6)]])
sm.nsimplify(B.subs(sys.constants))
References¶
- Smith2016
Smith, T., Barlow, J., Bualat, M., Fong, T., Provencher, C., Sanchez, H., & Smith, E. (2016). Astrobee: A new platform for free-flying robotics on the international space station.