3D N-Body Pendulum¶
Note
You can download this example as a Python script:
3d-n-body-pendulum.py or Jupyter notebook:
3d-n-body-pendulum.ipynb.
import sympy as sm
import sympy.physics.mechanics as me
import time
import numpy as np
from scipy.integrate import odeint, solve_ivp
from scipy.optimize import fsolve, minimize
import matplotlib.pyplot as plt
import matplotlib
%matplotlib inline
import pythreejs as p3js
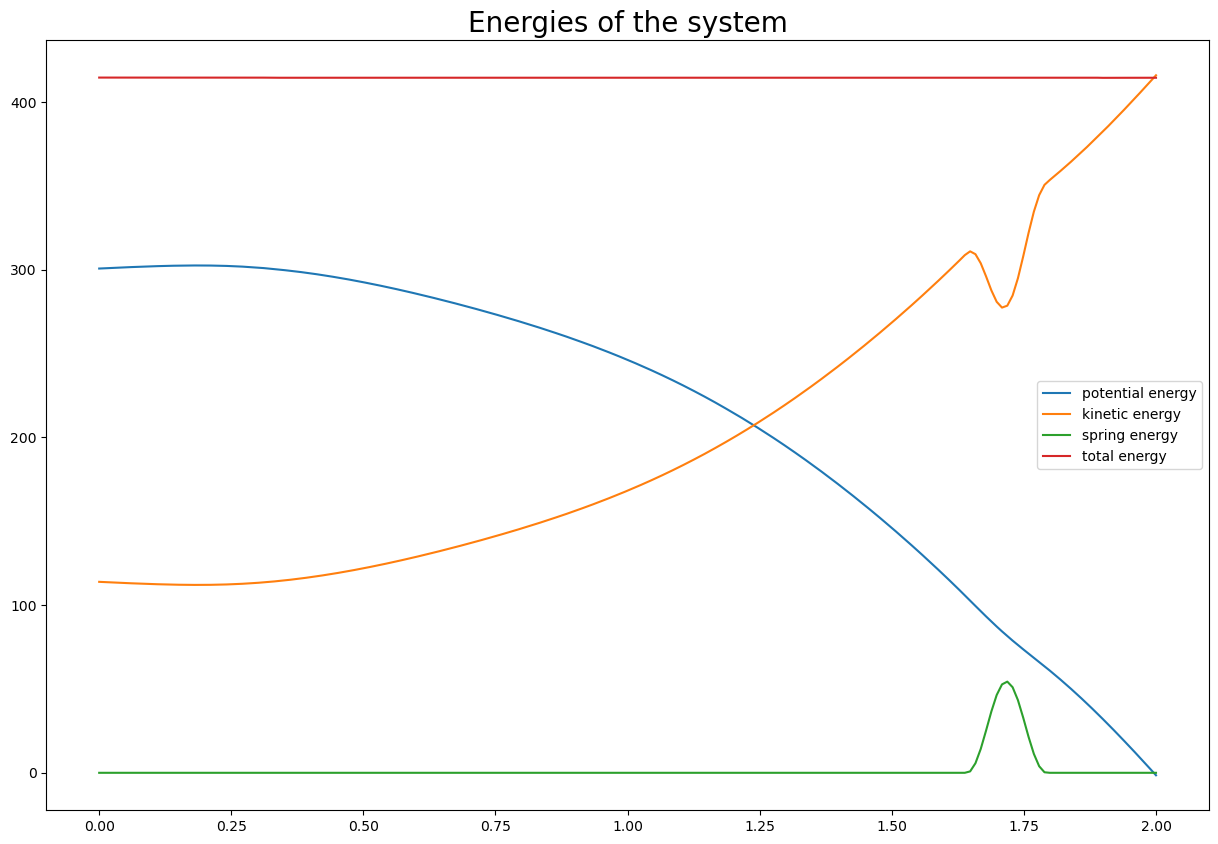
A pendulum consisting on n massless rods of length l. A ball of mass m and radius r is attached to each rod, such that the rod goes through the center of each ball. the center of the ball is fixed at the middle of the rod. the ball rotates around the rod. If two balls collide, they are ideally elastic, with ‘spring constant’ k. The collision is modeled using the sm.Heaviside(..) function. The balls are ideally slick, so collisions will not affect their rotation.
The total energy does not always remain constant. As method = ‘Radau’ in solve_ivp gives much ‘better’ results than no method (e.g. 15% deviation vs. 0.3% in some cases), I assume that this is due to numerical errors in the integration. - of course I do not know for sure.
start = time.time()
#==========================================================================
n = 3 # number of pendulum bodies, labelled 0, 1, .., n-1, must be two ore more.
#==========================================================================
m, m1, g, r, l, reibung, k, t = sm.symbols('m, m1, g, r, l, reibung, k, t')
iXX, iYY, iZZ = sm.symbols('iXX, iYY, iZZ')
q = [] #holds the generalized coordinates of each rod
u = [] # generalized angular speeds
A = [] # frames of each rod
Dmc = [] # geometric center of each body
P = [] # points at end of each rod. Dmc_i is between P_i and P_i+1
punkt = [] # marks a red dot on each ball, just used for animation
for i in range(n):
for j in ('x', 'y', 'z'):
q.append(me.dynamicsymbols('q' + j + str(i)))
u.append(me.dynamicsymbols('u' + j + str(i)))
A.append(me.ReferenceFrame('A' + str(i)))
Dmc.append(me.Point('Dmc' + str(i)))
P.append(me.Point('P' + str(i)))
punkt.append(me.Point('punkt' + str(i)))
N = me.ReferenceFrame('N') # inertial frame
P0 = me.Point('P0')
# set up the relevant frames, one for each body
rot = [] # for kinetatic equations
rot1 = [] # dto
A[0].orient_body_fixed(N, (q[0], q[1], q[2]), '123')
rot.append(A[0].ang_vel_in(N))
# it is VERY important, that the angular speed be expressed in therms of the 'child frame', otherwise
# the equations of motion become very large!
A[0].set_ang_vel(N, u[0]*A[0].x + u[1]*A[0].y + u[2]*A[0].z )
rot1.append(A[0].ang_vel_in(N))
for i in range(1, n):
A[i].orient_body_fixed(A[i-1], (q[3*i], q[3*i+1],q[3*i+2]), '123')
rot.append(A[i].ang_vel_in(N)) # needed for the kinematiic equations below
# it is VERY important, that the angular speed be expressed in therms of the 'child frame', otherwise
# the equations of motion become very large!
A[i].set_ang_vel(N, u[3*i]*A[i].x + u[3*i+1]*A[i].y + u[3*i+2]*A[i].z)
rot1.append(A[i].ang_vel_in(N)) # dto.
# locate the various points, and define their speeds
P[0].set_pos(P0, 0.)
P[0].set_vel(N, 0.) # fixed point
Dmc[0].set_pos(P[0], l/2. * A[0].y)
Dmc[0].v2pt_theory(P[0], N, A[0])
punkt[0].set_pos(Dmc[0], r*A[0].z) # only for the red dot in the animation
punkt[0].v2pt_theory(Dmc[0], N, A[0])
for i in range(1, n):
P[i].set_pos(P[i-1], l * A[i-1].y)
P[i].v2pt_theory(P[i-1], N, A[i-1])
Dmc[i].set_pos(P[i], l/sm.S(2.) * A[i].y)
Dmc[i].v2pt_theory(P[i], N, A[i])
punkt[i].set_pos(Dmc[i], r*A[i].z)
punkt[i].v2pt_theory(Dmc[i], N, A[i])
# make the list of the bodies
BODY = []
for i in range(n):
I = me.inertia(A[i], iXX, iYY, iZZ)
BODY.append(me.RigidBody('body' + str(i), Dmc[i], A[i], m, (I, Dmc[i])))
BODY.append(me.Particle('punct' + str(I), punkt[i], m1)) # the red dot may have a mass
# set up the forces
# weights
FG = [(Dmc[i], -m*g*N.y) for i in range(n)] + [(punkt[i], -m1*g*N.y) for i in range(n)]
# when the balls collide, they are ideally elastic, with 'spring constant' k. They are also completely
# slick, so collisions will not affect their rotational speeds
FB = []
for i in range(n):
for j in range(i+1, n):
aa = Dmc[j].pos_from(Dmc[i])
bb = aa.magnitude()
aa = aa.normalize()
forceij = (Dmc[j], k * (2*r - bb) * aa * sm.Heaviside(2.*r - bb))
FB.append(forceij)
forceji = (Dmc[i], -k * (2*r - bb) * aa * sm.Heaviside(2.*r - bb))
FB.append(forceji)
FL = FG + FB # list of forces
# kinematic equations
kd = []
for i in range(n):
# It is very important that below the frames A[i] be used, not N. Otherwise the equations of motion become very large.
for uv in A[i]:
kd.append(me.dot(rot[i] - rot1[i], uv))
# Kanes's equations
q1 = q
u1 = u
KM = me.KanesMethod(N, q_ind=q1, u_ind=u1, kd_eqs=kd)
(fr, frstar) = KM.kanes_equations(BODY, FL)
MM = KM.mass_matrix_full
print('MM DS', me.find_dynamicsymbols(MM))
print('MM free symbols', MM.free_symbols)
print('MM contains {} operations'.format(sum([MM[i, j].count_ops(visual=False)
for i in range(MM.shape[0]) for j in range(MM.shape[1])])), '\n')
force = KM.forcing_full
print('force DS', me.find_dynamicsymbols(force))
print('force free symbols', force.free_symbols)
print('force contains {} operations'.format(sum([force[i].count_ops(visual=False)
for i in range(force.shape[0])])), '\n')
# set up the energy equations. Absent ary friction the total energie should be cnstant
pot_energie = sum([m*g*me.dot(Dmc[i].pos_from(P[0]), N.y) for i in range(n)]) + sum([m1*g*me.dot(punkt[i]
.pos_from(P[0]), N.y) for i in range(n)])
kin_energie = sum([BODY[i].kinetic_energy(N) for i in range(2*n)])
spring_energie = sm.S(0.)
for i in range(n):
for j in range(i+1, n):
aa = Dmc[j].pos_from(Dmc[i])
bb = aa.magnitude()
aa = aa.normalize()
spring_energie += 0.5 * k * (2*r - bb)**2 * sm.Heaviside(2.*r - bb)
# position of the centers of the balls and the red dots on the ball. Needed for the animation
Dmc_loc = []
punkt_loc = []
for i in range(n):
Dmc_loc.append([me.dot(Dmc[i].pos_from(P[0]), uv) for uv in N])
punkt_loc.append([me.dot(punkt[i].pos_from(P[0]), uv) for uv in N])
# Lambdification
qL = q1 + u1
pL = [m, m1, g, r, l, iXX, iYY, iZZ, reibung, k]
MM_lam = sm.lambdify(qL + pL, MM, cse=True)
force_lam = sm.lambdify(qL + pL, force, cse=True)
pot_lam = sm.lambdify(qL + pL, pot_energie, cse=True)
kin_lam = sm.lambdify(qL + pL, kin_energie, cse=True)
spring_lam = sm.lambdify(qL + pL, spring_energie, cse=True)
Dmc_loc_lam = sm.lambdify(qL + pL, Dmc_loc, cse=True)
punkt_loc_lam = sm.lambdify(qL + pL, punkt_loc, cse=True)
print('it took {:.3f} sec to set up Kanes equations'.format(time.time() - start))
MM DS {qy1(t), qz2(t), qz1(t), qx1(t), qx2(t), qy2(t)}
MM free symbols {m1, m, t, l, iXX, r, iYY, iZZ}
MM contains 2067 operations
force DS {ux2(t), uz2(t), uy1(t), ux0(t), uz1(t), qy0(t), qy2(t), uy0(t), uy2(t), qy1(t), qx1(t), qx0(t), qz0(t), qz2(t), qz1(t), uz0(t), qx2(t), ux1(t)}
force free symbols {m1, m, t, iXX, r, iYY, g, l, k, iZZ}
force contains 12105 operations
it took 1.965 sec to set up Kanes equations
# numerical integration
start = time.time()
# Input values
#=====================================================================
r1 = 1.5 # radius of the ball
m1 = 1. # mass of the ball
m11 = m1 / 5. # mass of the red dot
l1 = 6. # length of the massless rod of the pendulum
k1 = 1000. # 'spring constant' of the balls
reibung1 = 0. # friction of the ball against the rod
q1x, q1y, q1z = 0.2, 0.2, 0.2 # initial deflection of the first rod
# for simplicity, I assume that the pendulum is straight initially
omega1 = 7.5 # initial rotation speed of ball_i around A[i].y
u1x, u1y, u1z = 0., omega1, 0. # initial rotational speed of the ball
intervall = 2.
#======================================================================
schritte = 100 * int(intervall)
times = np.linspace(0., intervall, schritte)
iXX1 = 2./5. * m1 * r1**2 # from the internet
iYY1 = iXX1
iZZ1 = iXX1
#pL = [m, g, r, l, iXX, iYY, iZZ, reibung, k]
pL_vals = [m1, m11, 9.8, r1, l1, iXX1, iYY1, iZZ1, reibung1, k1]
y0 = [q1x, q1y, q1z] + [0., 0., 0.] * (n-1) + [u1x, u1y, u1z] + [0. ,u1y, 0.] * (n-1)
print('Starting values: ', y0)
t_span = (0., intervall)
def gradient(t, y, args):
sol = np.linalg.solve(MM_lam(*y, *args), force_lam(*y, *args))
return np.array(sol).T[0]
resultat1 = solve_ivp(gradient, t_span, y0, t_eval = times, args=(pL_vals,), method='Radau')
resultat = resultat1.y.T
print('shape of resultat', resultat.shape)
event_dict = {-1: 'Integration failed', 0: 'Integration finished successfully', 1: 'some termination event'}
print(event_dict[resultat1.status])
print("To numerically integrate an intervall of {:.3f} sec the routine cycled {} times and it took {:.3f} sec"
.format(intervall, resultat1.nfev, time.time() - start))
Starting values: [0.2, 0.2, 0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 7.5, 0.0, 0.0, 7.5, 0.0, 0.0, 7.5, 0.0]
shape of resultat (200, 18)
Integration finished successfully
To numerically integrate an intervall of 2.000 sec the routine cycled 829 times and it took 0.286 sec
# plot the energies
pot_np = np.empty(schritte)
kin_np = np.empty(schritte)
spring_np = np.empty(schritte)
total_np = np.empty(schritte)
for i in range(schritte):
zeit = times[i]
pot_np[i] = pot_lam(*[resultat[i, j] for j in range(resultat.shape[1])], *pL_vals)
kin_np[i] = kin_lam(*[resultat[i, j] for j in range(resultat.shape[1])], *pL_vals)
spring_np[i] = spring_lam(*[resultat[i, j] for j in range(resultat.shape[1])], *pL_vals)
total_np[i] = pot_np[i] + kin_np[i] + spring_np[i]
if reibung1 == 0.:
total_max = np.max(total_np)
total_min = np.min(total_np)
print('deviation of total energy from being constant is {:.5f} % of max. total energy'
.format((total_max - total_min)/total_max*100) )
fig, ax = plt.subplots(figsize=(15, 10))
ax.plot(times, pot_np, label='potential energy')
ax.plot(times, kin_np, label='kinetic energy')
ax.plot(times, spring_np, label='spring energy')
ax.plot(times, total_np, label='total energy')
ax.set_title('Energies of the system', fontsize=20)
ax.legend();
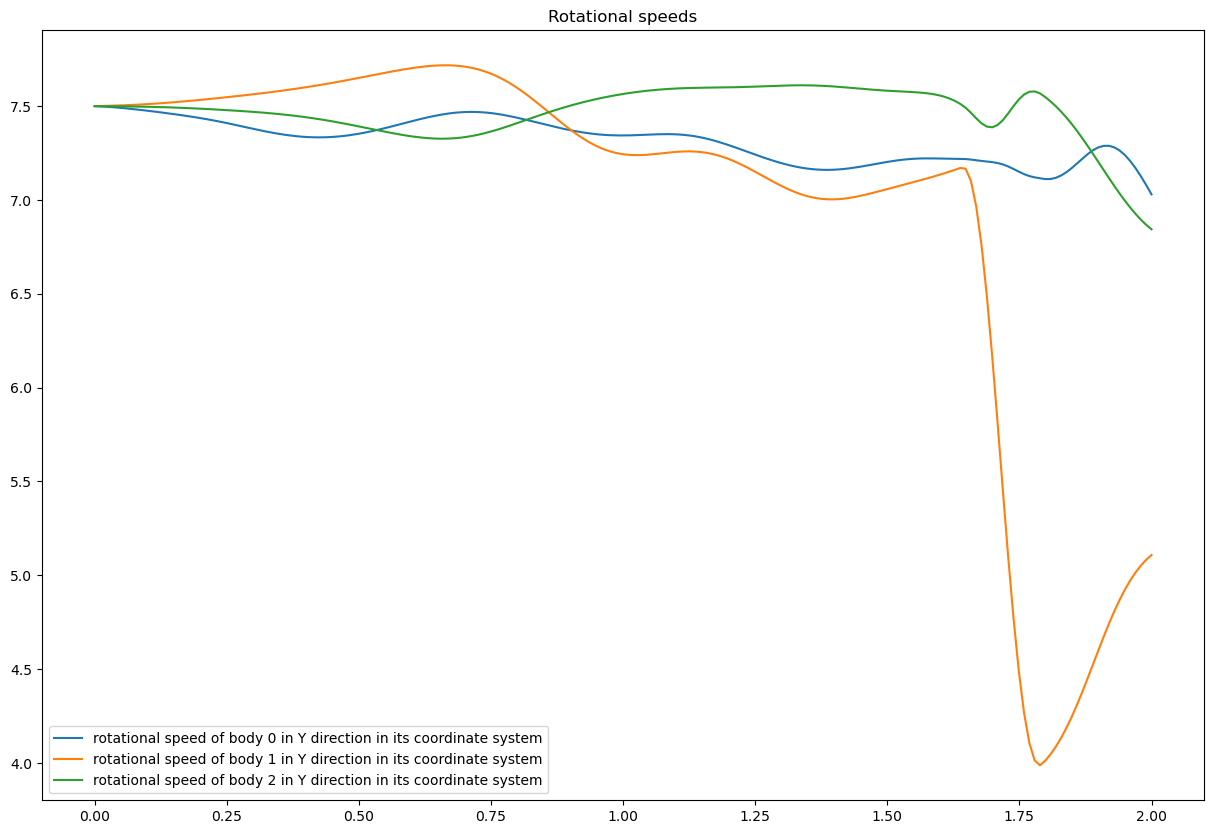
#plot the main rotational speeds, uy_r
fig, ax = plt.subplots(figsize=(15, 10))
for i in range(n, 2*n):
ax.plot(times, resultat[:, 3*i+1],
label='rotational speed of body {} in Y direction in its coordinate system'.format(i-n))
ax.set_title('Rotational speeds')
ax.legend();
deviation of total energy from being constant is 0.04142 % of max. total energy
Animation using pythreejs. This is basically copied from a program by Jason Moore, just adapted to my needs here.
NOTE: the ‘reference frame’ for pythreejs seems to be: X - axis downwards, color red Y - axis to the right, color green (hence:) Z - axis pointing to the observer, color blue
Rotation is used to transform my coordinate system used above to set up the equations of motion to the one prescribed by pythreejs.
If you know from the beginning, that you want to use pythreejs it is probably better to use its orientation of coordinates, when setting up Kane’s equations. Saves the trouble of guessing, which rotation is correct. I am not sure my rotation is fully correct, just played around until it ‘looked’ reasonable.
winkel = sm.symbols('winkel')
Rotation1 = sm.Matrix([[sm.cos(winkel), -sm.sin(winkel), 0], [sm.sin(winkel), sm.cos(winkel), 0], [0., 0., 1]])
Rot_lam = sm.lambdify(winkel, Rotation1.T, cse=True)
Rotation = Rot_lam(np.pi/2.)
TC_store = []
TR_store = []
TP_store = []
body_mesh_store = []
track_store = []
farben = ['orange', 'blue', 'green', 'yellow', 'red']
for i in range(n):
#for its mass center
TC = sm.eye(4)
TC[:3, :3] = (A[i].dcm(N)) * Rotation
TC = TC.reshape(16, 1)
TC_lam = sm.lambdify(qL + pL, TC, cse=True)
TR = sm.eye(4)
TR[:3, :3] = (A[i].dcm(N)) * Rotation
TR = TR.reshape(16, 1)
TR_lam = sm.lambdify(qL + pL, TR, cse=True)
TP = sm.eye(4)
TP[:3, :3] = (A[i].dcm(N)) * Rotation
TP = TP.reshape(16, 1)
TP_lam = sm.lambdify(qL + pL, TP, cse=True)
# store the information about the body, expressed in TAc for every time step.
TCs = [] # for the ball
TRs = [] # for the rod
TPs = [] # for the red dot
# Create the TAs, containing 'one TA' for each time step
# resultat contains the results of the numeric integration.
# where the numeric integration was evaluated
# scala is the factor by which the position of the body is changed, to keep it on the screen.
scala = 1.
for k in range(resultat.shape[0]):
zeit = times[i]
TCi = TC_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals) # the balls
TRi = TR_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals) # the rod
TPi = TP_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals) # the dot
# TAi[12], TAi[13], TAi[14] hold the location of A2 w.r.t. N.
# As the axis chosen for solving the equations of motion, and the axis given by pythreejs do not
# coincide, the values for TAi[..] must be given accordingly.
# of course here different locations for center of ball and center of mass.
TRi[12] = -Dmc_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][1]
TRi[13] = Dmc_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][0] / scala
TRi[14] = Dmc_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][2] / scala
TCi[12] = -Dmc_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][1]
TCi[13] = Dmc_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][0] / scala
TCi[14] = Dmc_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][2] / scala
TPi[12] = -punkt_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][1]
TPi[13] = punkt_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][0] / scala
TPi[14] = punkt_loc_lam(*[resultat[k, l] for l in range(resultat.shape[1])], *pL_vals)[i][2] / scala
TRs.append(TRi.squeeze().tolist())
TCs.append(TCi.squeeze().tolist())
TPs.append(TPi.squeeze().tolist())
TC_store.append(TCs)
TR_store.append(TRs)
TP_store.append(TPs)
# Create the objects, which will move
# 1. The ball
body_geom_C = p3js.SphereGeometry(r1, 12, 12)
body_material_C = p3js.MeshStandardMaterial(color=farben[i], wireframe=False)
body_mesh_C = p3js.Mesh(geometry=body_geom_C, material=body_material_C, name='ball_' + str(i))
# 2. Rod
body_geom_R = p3js.CylinderGeometry(radiusTop=0.05, radiusBottom=0.05, height=l1,
radialSegments=6, heightSegments=10, openEnded=False)
body_material_R = p3js.MeshStandardMaterial(color='black', wireframe=False)
body_mesh_R = p3js.Mesh(geometry=body_geom_R, material=body_material_R, name='rod_' + str(i))
# 3. the dot
body_geom_P = p3js.SphereGeometry(0.25, 12, 12)
body_material_P = p3js.MeshStandardMaterial(color='red', wireframe=False)
body_mesh_P = p3js.Mesh(geometry=body_geom_P, material=body_material_P, name='punkt_' + str(i))
# locate the body in 3D space and add the coordinate system of the body
body_mesh_R.matrixAutoUpdate = False
body_mesh_R.add(p3js.AxesHelper(0.1)) # length of the axis of the ball system A2
body_mesh_R.matrix = TR_store[i][0] # starting point of the animation
body_mesh_C.matrixAutoUpdate = False
body_mesh_C.add(p3js.AxesHelper(0.01)) # length of the axis of the center of mass system A2
body_mesh_C.matrix = TC_store[i][0] # starting point of the animation
body_mesh_P.matrixAutoUpdate = False
body_mesh_P.add(p3js.AxesHelper(0.01)) # length of the axis of the center of mass system A2
body_mesh_P.matrix = TP_store[i][0] # starting point of the animation
body_mesh_store.append(body_mesh_C)
body_mesh_store.append(body_mesh_R)
body_mesh_store.append(body_mesh_P)
# Create the 'picture'.
# all the 'paramters' are taken by trial and error.
view_width = 1200
view_height = 400
# Values just found by trial an error.
if n == 3:
p1, p2 = 7, 7
p3 = 35
elif n == 4:
p1, p2 = 5, 5
p3 = 50
elif n == 5:
p1, p2 = 5, 5
p3 = 65
else:
p1, p2 = 5, 5
p3 = 25
camera = p3js.PerspectiveCamera(position=[p1, p2, p3],
up=[-1.0, 0.0, 0.0],
aspect=view_width/view_height)
key_light = p3js.DirectionalLight(position=[0, 0, 10])
ambient_light = p3js.AmbientLight()
axes = p3js.AxesHelper(20)
print(p1, p2, p3)
children = []
for i in range(3*n):
children = children + [body_mesh_store[i], axes, camera, key_light, ambient_light]
scene = p3js.Scene(children=children)
controller = p3js.OrbitControls(controlling=camera)
renderer = p3js.Renderer(camera=camera, scene=scene, controls=[controller],
width=view_width, height=view_height)
# Create the action, simply copied from JM's lecture.
for i in range(n):
eigenname = 'ball_'+str(i)
track_C = p3js.VectorKeyframeTrack(
name="scene/" + eigenname + ".matrix",
times=times,
values=TC_store[i])
eigenname = 'rod_' + str(i)
track_R = p3js.VectorKeyframeTrack(
name="scene/" + eigenname + ".matrix",
times=times,
values=TR_store[i])
eigenname = 'punkt_' + str(i)
track_P = p3js.VectorKeyframeTrack(
name="scene/" + eigenname + ".matrix",
times=times,
values=TP_store[i])
track_store += [track_C] + [track_R] + [track_P]
duration = times[-1] - times[0]
clip = p3js.AnimationClip(tracks=track_store, duration=duration)
action = p3js.AnimationAction(p3js.AnimationMixer(scene), clip, scene)
renderer
7 7 35
action