Usage¶
This is an example of a simple one degree of freedom system: a mass under the influence of a spring, damper, gravity and an external force:
/ / / / / / / / /
-----------------
| | | | g
\ | | | V
k / --- c |
| | | x, v
-------- V
| m | -----
--------
| F
V
Derive the system:
from sympy import symbols
import sympy.physics.mechanics as me
mass, stiffness, damping, gravity = symbols('m, k, c, g')
position, speed = me.dynamicsymbols('x v')
positiond = me.dynamicsymbols('x', 1)
force = me.dynamicsymbols('F')
ceiling = me.ReferenceFrame('N')
origin = me.Point('origin')
origin.set_vel(ceiling, 0)
center = origin.locatenew('center', position * ceiling.x)
center.set_vel(ceiling, speed * ceiling.x)
block = me.Particle('block', center, mass)
kinematic_equations = [speed - positiond]
force_magnitude = mass * gravity - stiffness * position - damping * speed + force
forces = [(center, force_magnitude * ceiling.x)]
particles = [block]
kane = me.KanesMethod(ceiling, q_ind=[position], u_ind=[speed],
kd_eqs=kinematic_equations)
kane.kanes_equations(particles, loads=forces)
Create a system to manage integration and specify numerical values for the constants and specified quantities. Here, we specify sinusoidal forcing:
from numpy import array, linspace, sin
from pydy.system import System
sys = System(kane,
constants={mass: 1.0, stiffness: 10.0,
damping: 0.4, gravity: 9.8},
specifieds={force: lambda x, t: sin(t)},
initial_conditions={position: 0.1, speed: -1.0},
times=linspace(0.0, 10.0, 1000))
Integrate the equations of motion to get the state trajectories:
y = sys.integrate()
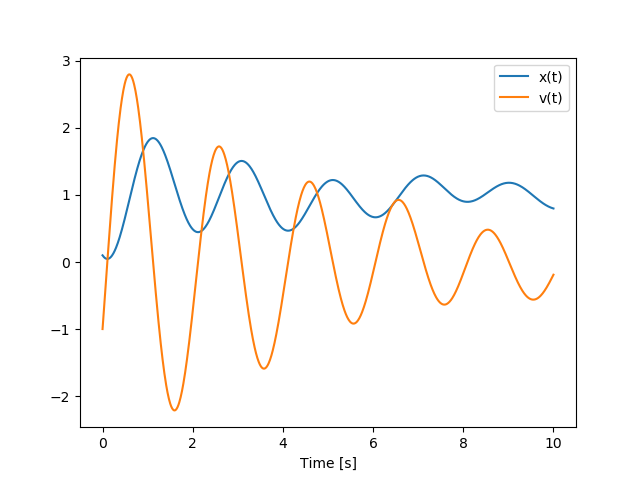
Plot the results:
import matplotlib.pyplot as plt
plt.plot(sys.times, y)
plt.legend((str(position), str(speed)))
plt.xlabel('Time [s]')
plt.show()